
Michigan Scientific Corporationin Pyörän pulssimuunnin (WPT) on kompakti enkooderijärjestelmä, joka on suunniteltu kiinnitettäväksi ajoneuvon pyörään. WPT:n kooderisignaaleja voidaan käyttää laskemaan kiertonopeus, pyörän kulma-asento ja pyörimissuunta. Näitä mittauksia käytetään yleisesti ajoneuvon sijainnin seuraamiseen sovelluksissa, kuten sähköajoneuvojen kehittämisessä ja autonomisen ajoneuvon seurannassa.
Autonominen ajoneuvojen seuranta
Autonomiset ajoneuvot luottavat Global Navigation Satellite System (GNSS) -tekniikkaan sijaintinsa seuraamiseen, mutta nämä järjestelmät voivat epäonnistua kaupunki-, sisä- tai maanalaisissa ympäristöissä. Alueilla, joilla GNSS-seuranta ei ole käytettävissä, ajoneuvojen sijainnin seuraamiseen on käytettävä muita tekniikoita, kuten pyörän pulssiantureita tai kiihtyvyysantureita. WPT-järjestelmien avulla voidaan seurata autonomisten trukkien sijaintia varastoissa tai autonomisten maanalaisten kaivoslaitteiden sijaintia. Lisäksi WPT-järjestelmää voidaan käyttää kiihtyvyysanturipohjaisten järjestelmien tarkkuuden testaamiseen ja validointiin.
WPT-anturin kuvaus
Kokoonpano on suunniteltu kiinnitä nopeasti ja helposti ajoneuvon pyörään. Sen kompakti ja kevyt rakenne koostuu elektroniikasta kestävässä kotelossa. WPT on asennettu pyörään kautta Pikaliitinholkkimutteriholkit tai Extended Lug Nuts. Adapterilevyjä ja Quick Connect -ulokemutteriholkkeja on saatavana eri kokoisina ja eri kokoonpanoina, jotta ne täyttävät kaikki pyörän vakiomitat. A Magneettinen ajoneuvon staattorin kiinnitys ja pidätystankoa käytetään pitämään enkooderimoduulin staattori paikallaan, kun anturia käytetään ajoneuvossa. Ajoneuvojen testauksen luonteesta johtuen WPT on suunniteltu erittäin kestäväksi. IP67-luokituksen omaavien pyörivien tiivisteiden ansiosta WPT on ihanteellinen testaukseen sateisissa, lumisissa tai likaisissa ympäristöissä.
kiinnitä nopeasti ja helposti ajoneuvon pyörään. Sen kompakti ja kevyt rakenne koostuu elektroniikasta kestävässä kotelossa. WPT on asennettu pyörään kautta Pikaliitinholkkimutteriholkit tai Extended Lug Nuts. Adapterilevyjä ja Quick Connect -ulokemutteriholkkeja on saatavana eri kokoisina ja eri kokoonpanoina, jotta ne täyttävät kaikki pyörän vakiomitat. A Magneettinen ajoneuvon staattorin kiinnitys ja pidätystankoa käytetään pitämään enkooderimoduulin staattori paikallaan, kun anturia käytetään ajoneuvossa. Ajoneuvojen testauksen luonteesta johtuen WPT on suunniteltu erittäin kestäväksi. IP67-luokituksen omaavien pyörivien tiivisteiden ansiosta WPT on ihanteellinen testaukseen sateisissa, lumisissa tai likaisissa ympäristöissä.
Enkooderin signaalinkäsittelylaitteet
Optisen WPT-enkooderin resoluutiot ovat jopa 5,000 360 pulssia kierrosta kohti (ppr). Vakioresoluutiot ovat 512 ppr, 1024 ppr, 5,000 ppr ja 90 0 ppr. Lisäratkaisuja on saatavilla pyynnöstä. Kaikilla kooderivalinnoilla on neljä standardilähtöä: A, B, I ja A⊕B. Lähdöt A ja B ovat kvadratuurissa, mikä tarkoittaa, että ne ovat 5 astetta eri vaiheissa. Lähtö A⊕B on kahden kanavan OR, joka kaksinkertaistaa kooderin vakioresoluution. Lähdöt, XNUMX - XNUMX digitaalista volttia, voivat ohjata TTL-kuormia.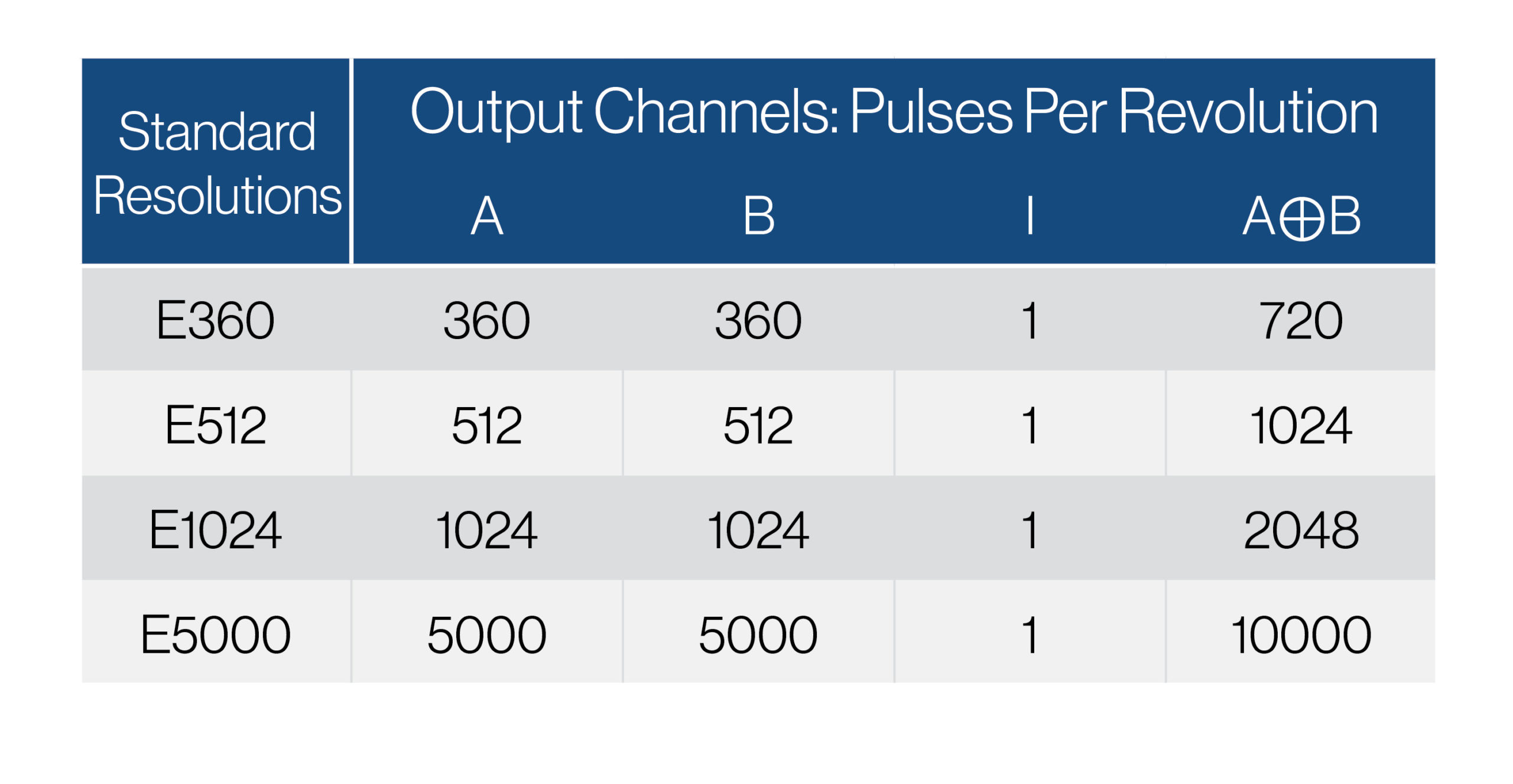
Michigan Scientific EC-LV Encoder Signal Conditioner muuntaa WPT-anturin kooderin 0 - 5 digitaaliset volttipulssit lineaarisiksi jännitteiksi, jotka ovat verrannollisia kulma-asemaan ja kulmanopeuteen. EC-LV voidaan lisätä linjaan staattorikaapelin kanssa, eikä se vaadi lisäohjelmointia. Ulkoisten kytkimien avulla käyttäjä voi valita nopeusalueen ja pyörimissuunnan.
Jos olet kiinnostunut oppimaan lisää siitä, kuinka Wheel Pulse Transduceria voidaan käyttää sovelluksessasi, ole hyvä ja ota yhteyttä Michiganin tieteelliseen edustajaan tänään.